

• Le due schede devono necessariamente essere collegate insieme per poter funzionare.
• Un unico cavo flat a 40 pin si occupa di trasferire l’alimentazione e tutti i segnali da una scheda all’altra.
• Durante la costruzione del robot, spesso era necessario rimuovere la Scheda 2 per poter effettuare delle saldature o dei test. Per questo motivo è stato inserito un connettore ausiliario a 4 pin che fornisce alla Scheda 2 solo l’alimentazione a 5 Volt. In questo modo la Fox Board sarà utilizzabile anche se non potrà dialogare con i dispositivi della Scheda 1.

• La batteria è costituita da 4 celle collegate in serie.
• Ogni cella è un accumulatore a Ioni di Litio che fornisce 3,7 Volt.
• La tensione in uscita dalla batteria è quindi di 14,8 Volt.
• Ogni cella ha la capacità di 2,2 Ampere/Ora.

• Il Caricatore permette di ricaricare in sicurezza la batteria, fornendo esattamente 4,2 Volt per cella (16,8 Volt in totale) con una corrente non superiore a 985 milliampere.
• Un alimentatore HP da 18,5 Volt alimenta il circuito di regolazione della corrente e della tensione progettato da Scott Henion.

• Per protezione da eventuali cortocircuiti, subito prima dell’interruttore generale è presente un fusibile da 3,15 Ampere.
• Una eventuale corrente superiore a questo valore, fa bruciare immediatamente il fusibile, senza danneggiare gli altri circuiti.

• Lo Shutdown Controller, inserito in un apposito connettore della Scheda 1, permette il completo spegnimento del Robot quando il sistema operativo della Fox Board viene arrestato.
• Il circuito è composto principalmente da un relè bistabile a doppia bobina.
• Un pulsante posizionato sul retro permette l’accensione del Robot.
• Il segnale SHDN (Shutdown) proveniente dalla Fox Board provoca invece l’interruzione dell’alimentazione.
• Lo Shutdown Controller essendo rimovibile risulta essere anche la ‘chiave’ di accensione del Robot.
• In mancanza di questa piccola scheda il Robot non potrà essere acceso.

• Gli stabilizzatori di tensione hanno l’importante compito di livellare e stabilizzare la tensione della batteria, che, oltre ad essere troppo elevata, varia in base alla carica residua.
• Gli integrati L7805 e L7812 forniscono in uscita rispettivamente 5 Volt e 12 Volt.
• La tensione superflua viene inevitabilmente trasformata in calore che viene smaltito con un dissipatore metallico e da una ventola alimentata a 12 Volt.

• Un piccolo circuito formato da un optoisolatore H11D4, segnala alla Fox Board se la batteria è in carica.
• Inoltre, la tensione della batteria, abbassata con un partitore di tensione, viene misurata dalla Fox Board grazie al suo ADC (Analog to Digital Converter).
• Il software di gestione sarà quindi in grado di mostrare il livello di carica residua della batteria.
• Il dispositivo viene chiamato anche BSI (Battery Status Indicator).

• Un ulteriore piccolo circuito, formato da un relè e da un transistor NPN tipo BC517, si occupa di scollegare il motore posteriore e i 12 Volt se richiesto dalla Fox Board.
• Per fare ciò, viene utilizzata una porta GPIO connessa alla base del transistor (collegato a sua volta al relè).

• La Fox Board G20, è prodotta dall’italiana Acme Systems Srl.
• Si tratta di un Single Board Computer, ovvero di un completo sistema basato su Linux ma con potenzialità hardware molto più ampie di quelle di un semplice PC.
• La distribuzione di Linux che gira sulla Fox Board è Debian, con kernel opportunamente modificato e alleggerito.
• La Fox Board non ha nessuna uscita video e Debian non ha nessuna interfaccia grafica: dispone solamente di una CLI (Command Line Interface) accessibile da un terminale.
• La mancanza della GUI, presente invece su schede avversarie come la Raspberry Pi, risulta essere un vantaggio dal punto di vista delle prestazioni essendo il S.O. più leggero e stabile.

• CPU: ARM AT91SAM9G20 a 400Mhz
• RAM: 64MB (SDRAM)
• ROM: 256KB (Flash Memory)
• Storage Principale: Memory Card da 4GB
• Porte di comunicazione: 3 USB, 1 Ethernet, 80 GPIO, 4 ADC, 6 USART, 2 SPI, 1 I2C.
• Altre caratteristiche: alimentatore integrato, Clock Real Time con batteria tampone, pulsante per la procedura di spegnimento.
• Attraverso la scheda Daisy 1, montata direttamente sopra la Fox Board, è possibile connettere altri dispositivi della Acme Systems alla Fox Board stessa.

• Il motore posteriore, di tipo DC (Direct Current), è alimentato direttamente dalla batteria e quindi riceve una tensione di circa 14,8 Volt non stabilizzati.
• È collegato alla Scheda 1 con 2 fascette stringenti.
• All’albero motore è collegata una puleggia a cui aderisce la cinghia collegata all’asse posteriore.
• Una molla tira il motore allontanandolo dalle ruote. Questo permette alla cinghia di restare sempre ben aderente alle pulegge.

• La gestione del movimento del motore è affidata a 2 relè comandati dalla Fox Board attraverso 2 transistor NPN tipo BC517.
• Il primo relè attiva l’alimentazione, il secondo definisce la direzione della rotazione dell’albero motore scambiando i 2 fili che arrivano al motore stesso (ovvero 14,8 Volt e Gnd).

• Il contagiri permette di misurare i giri che compie l’asse posteriore ed è quindi posizionato in prossimità della puleggia dell’asse.
• Si tratta di una fotocellula, ovvero di un diodo Led a luce infrarossa e di un fototransistor posizionati a pochi millimetri l’uno dall’altro.
• Quando l’asse ruota, ognuno dei 6 prolungamenti della puleggia attraversa la fotocellula e interrompe il fascio di luce infrarossa. Questa interruzione viene percepita dalla Fox Board che quindi potrà sapere esattamente quanti ‘step’ ha percorso il Robot.

• Il motore anteriore permette al Robot di sterzare per effettuare delle curve.
• Il motore è di tipo ‘Stepper Bipolare’ ed è alimentato dalla tensione di 14,8 Volt della batteria.
• Questo tipo di motore permette una precisione di spostamento molto superiore rispetto ad un motore DC, a scapito di un maggiore costo e di una difficoltà in più nel pilotarlo.
• Per permettere al motore di ruotare è necessario fornire ai suoi 4 pin dei brevi impulsi ordinati e sequenziali.
• La corretta sequenza permette al motore di girare in entrambe le direzioni.

• Il circuito che pilota il motore anteriore è basato su un singolo integrato L298.
• Alle sue uscite, sono collegati diversi diodi che eliminano eventuali tensioni inverse.
• La combinazione esatta di impulsi è definita dalla Fox Board e la invia all’integrato attraverso 4 porte GPIO.
• L’integrato si occupa di trasferire questi impulsi al motore.

• Questo motore permette la rotazione del modulo SRF08 che è montato sopra il motore stesso.
• Il motore è a sua volta attaccato alla scheda 2, ad una altezza di 3 centimetri circa.
• È un motore ‘Stepper Unipolare’ e viene alimentato dai 12 Volt stabilizzati.
• Il metodo di funzionamento è identico al motore Stepper Bipolare utilizzato per sterzare.

• Il circuito integrato che gestisce il motore non è un L298 (utilizzato solo per i motori Bipolari) ma un ULN2003A.
• Il compito che svolge è identico a quello svolto dall’L298 del motore anteriore.
• Anche l’interfacciamento con la Fox Board avviene sempre grazie all’uso di 4 porte GPIO.

• Nella scheda 2 è presente un piccolo altoparlante che permette di generare suoni.
• Da una porta GPIO della Fox Board arriverà un segnale ad onda quadra avente una certa frequenza.
• Il transistor BD243C amplificherà questo segnale e l’altoparlante potrà generare il suono.

• Il Robot è dotato di 4 sensori ad infrarossi OPB732, posizionati ai 4 angoli della Scheda 1.
• Internamente, sono costituiti da un Led ad infrarossi e da un fototransistor sensibile alla luce infrarossa.
• Se un ostacolo è abbastanza vicino (massimo 2,5-3 cm), la luce emessa dal Led viene riflessa dall’ostacolo e il fototransitor la rileva.
• Purtroppo sono influenzati dalla luce solare che emette anch’essa radiazione infrarossa. In caso di forte luminosità, segnalano quindi un ostacolo inesistente.

• L’uscita di ogni sensore è analogica poiché corrisponde al collettore del fototransistor.
• Per trasformare il segnale da analogico a digitale viene utilizzata una porta NOT Triggherata 40106.
• Il segnale così ottenuto (0 Volt o 5 Volt) viene inoltre livellato da un partitore di tensione per evitare che le porte GPIO (che funzionano a 3,3 Volt) vengano danneggiate.

• Il Robot è provvisto di 2 Diodi Led RGB da 5mm e di un Led ad alta intensità di 10mm (Faro Anteriore).
• I Led RGB sono posizionati a destra e a sinistra della Webcam.
• Ogni Led RGB è internamente formato da 3 punti luce che emettono i 3 colori fondamentali per costituire tutti gli altri: Rosso, Verde e Blu.
• I colori disponibili sono quindi Blu, Azzurro, Verde, Rosso, Viola, Giallo e Bianco.

• Il Faro Anteriore è posizionato davanti alla Fox Board, nella scheda 2.
• Non è direttamente saldato alla scheda ma si trova montato sopra un piccolo slot.
• Quando si deve rimuovere la MicroSD dalla Fox Board, sarà necessario rimuovere il Led da questo alloggiamento.
• Il Led emette una forte luce bianca, capace di illuminare la strada per qualche metro.

• Il Controller che pilota i due Led RGB, è formato da 6 transistor NPN tipo BC546.
• La base di ogni transistor è collegata ad una porta GPIO della Fox Board.
• Il collettore è invece collegato ad uno dei 3 colori dei 2 Led.
• Il Controller del Faro Anteriore è invece formato da un transistor NPN tipo BC337 collegato esattamente come gli altri 2 transistor.

• La Webcam del Robot è posizionata sopra il motore anteriore.
• È connessa alla Fox Board grazie ad una porta USB.
• Non è una webcam HD, permette una risoluzione massima di 640x480 pixel.
• All’interno della Fox Board è installato il software Open Source MJPG-Streamer che consente lo streaming video e la cattura di fotogrammi.
• Sia lo streaming sia le foto sono visibili attraverso il sito web interno della Fox Board.

• La WLAN Stick (chiavetta WLAN) permette al robot una connessione senza fili (Wireless) con un PC.
• La chiavetta è connessa direttamente alla Fox Board attraverso una porta USB.
• All’avvio del Robot, Linux controllerà automaticamente se la chiavetta è inserita.
• Se non è inserita, Linux resta in attesa di un collegamento alternativo: via cavo Ethernet o via porta miniUSB.

• Il modulo Daisy 7, prodotto dalla Acme Systems, è uno dei dispositivi più importanti del Robot.
• Al suo interno sono presenti: un termometro, un barometro, una IMU e un ricevitore GPS.
• La IMU (Inertial Measurement Unit) è composta da 3 sensori inerziali a 3 assi ciascuno: un accelerometro, un giroscopio e un magnetometro.
• Tutti i sensori sono connessi alla Fox Board con il protocollo I2C. Il ricevitore GPS è invece connesso con un protocollo seriale funzionante a 3,3 Volt.
• Il barometro e il termometro sono entrambi contenuti nel circuito integrato BMP085. Misurando la pressione atmosferica, sarà possibile anche calcolare l’altitudine rispetto al livello del mare.
• L’accelerometro a 3 assi si trova nell’integrato LIS331DLH.
• Il giroscopio a 3 assi si trova nell’integrato L3G4200D.
• Il magnetometro a 3 assi si trova nell’integrato HMC5883L.Questi tre sensori inerziali inviano alla Fox Board ben 9 valori che dovranno essere opportunamente elaborati per ottenere la posizione del Robot nello spazio.
• Il ricevitore GPS si trova nell’integrato Venus638LPx. Ad esso è collegata un’apposita antenna attiva che riceve il segnale e lo amplifica. I connettori del cavo sono di tipo SMA.
• Grazie alla connessione con i satelliti GPS, si potrà localizzare il Robot, trovare l’altitudine e ricavare l’orario preciso degli orologi atomici presenti nei satelliti.
• Tutti i dispositivi del modulo, sono connessi alla Fox Board grazie ad un cavo flat da 10 pin che arriva alla scheda Daisy 1, a sua volta connessa alla Fox Board.


• Il modulo Daisy 13, anch’esso prodotto dalla Acme Systems, è un modem GPRS.
• Grazie a questo dispositivo è possibile inviare e ricevere un SMS inserendo semplicemente una SIM nell’apposito socket.
• Sfruttando le frequenze della rete GPRS, un telefono cellulare potrà inviare comandi alla Fox Board.
• Il modulo, fisicamente connesso alla Fox Board grazie alla scheda Daisy 1, sfrutta il protocollo seriale per comunicare con Linux.
• Al ricevitore, verranno inviati opportuni comandi (‘AT Command’) utili a configurare il modem.


• Il modulo SRF08, prodotto dalla Devantech, include al suo interno un sensore ad ultrasuoni (sonar) e un sensore di luminosità.
• Si trova montato in un apposito supporto che lo fissa al motore.
• È collegato alla Scheda 2 grazie ad un cavo flat da 4 pin, tenuto abbastanza lungo da permettere la completa rotazione del modulo stesso intorno al motore.
• Per permettere la comunicazione con la Fox Board entrambi i sensori utilizzano il protocollo I2C.
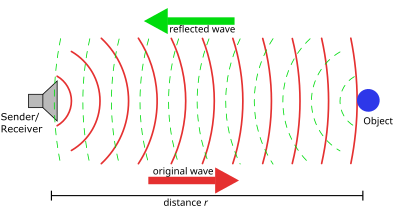
• Il Sonar per valutare la distanza da un ostacolo, invia un’onda ad ultrasuoni (circa 40KHz) attraverso il suo trasmettitore ultrasonico.
• Le onde sonore si scontreranno con l’ostacolo e ritorneranno al ricevitore ultrasonico.
• Calcolando il tempo trascorso fra la trasmissione e la ricezione del segnale, il controller interno riuscirà a trovare la distanza in centimetri fino ad un massimo teorico di 6 metri.

• Il sensore di luminosità è formato principalmente da una fotoresistenza posizionata sopra il ricetrasmettitore ultrasonico.
• Al variare della luminosità, il valore della fotoresistenza cambierà facendo variare la tensione.
• Il Controller interno provvede a convertire la variazione di tensione in variazione di luminosità.
• A differenza dei moduli Daisy 7 e Daisy 13, che possono essere direttamente connessi alla Fox Board, il modulo SRF08 ha la necessità di un piccolo circuito che abbassa la tensione.
• Infatti, la Fox Board usa il protocollo I2C a 3,3 Volt mentre il dispositivo utilizza il protocollo I2C a 5 Volt.
• Il circuito è formato da una coppia di resistenze da 2,2 Kohm, una per il segnale di Dati e l’altra per il segnale di Clock.


• Questa modalità si presenta sotto forma di un menù testuale che mostra la data, l’orario, la carica della batteria e l’elenco dei codici operativi con le rispettive descrizioni.
• Sotto il menù un prompt resta in attesa di un comando dell’utente.
• Si tratta della modalità più diretta e più veloce per l’interazione con il Robot anche se ovviamente non dispone di una GUI.
• Non vengono necessariamente utilizzati i servizi del TCP/IP se il Robot è connesso attraverso la porta miniUSB.
• Per ritornare alla modalità Console mentre si sta usando un’altra modalità è necessario fornire il codice operativo ‘83’.



• Lighttpd è il Webserver Open source installato all’interno del sistema operativo della Fox Board.
• Spreca molte meno risorse rispetto ad altri webserver perché Lighttpd è studiato proprio per le macchine poco potenti.
• Lighttpd è in grado di visualizzare: un client SSH (Shell-In-A-Box), un client FTP (Net2ftp), le pagine di MJPG-Streamer, le pagine html con i grafici che usano la libreria RGraph, il gestore per il Database PhpMyAdmin.
• La pagina Index, disegnata da Gregorio Candolo, è scritta in HTML5 e JavaScript.

• MJPG-Streamer è un software Open Source che consente di gestire la Webcam del Robot attraverso semplici comandi forniti dal software di gestione.
• Può visualizzare nel browser lo streaming video della Webcam attraverso il protocollo HTTP sulla porta 4300 e può scattare e salvare fotografie, anch’esse visualizzabili dal browser.
• Supporta numerose risoluzioni e frame rate.
• Nelle webcam con sistema ‘Pan & Tilt’ consente anche di ruotare, zoomare e modificare la luminosita del Led della webcam direttamente dalla pagine HTTP (Funzionalità non supportate dalla Webcam del Robot).
• Gli script delle pagine web sono scritti in JavaScript.

• Shell-In-A-Box è un potente emulatore di terminale scritto in Javascript accessibile direttamente dal browser (protocollo HTTP - HyperText Transfer Protocol).
• Utilizza la porta TCP 4200 del Webserver e si connette al Robot stesso con il protocollo SSH (Secure Shell) in ascolto sulla porta TCP 22.
• Supporta tutte le caratteristiche di un terminale DEC VT100 come i colori e le sequenze di Escape ed è quindi un’ottima alternativa agli emulatori di terminale ‘classici’ come Putty.
• Shell-In-A-Box dispone anche di un comodo menù a tendina che permette di copiare o incollare del testo e di adattarsi alla grandezza del browser con l’apposita funzione ‘Reset’.

• Net2ftp è un client FTP (File Transfer Protocol) grafico scritto in PHP anch'esso direttamente utilizzabile dal browser.
• Utilizza la porta standard del protocollo HTTP (ovvero la porta TCP 80) e si connette al Server FTP del Robot in ascolto sulla porta TCP 20 e 21.
• Permette di visualizzare, modificare, creare e rimuovere i file e le cartelle del Filesystem di Linux del Robot.
• È anche possibile caricare o scaricare file dal PC client.
• Si tratta di un’alternativa a client non Web-based come FileZilla o WinSCP anche se quest’ultimi hanno il vantaggio di poter utilizzare anche connessioni criptate con il protocollo SCP (Secure CoPy, porta TCP 22).

• RGraph è una libreria scritta in Javascript e HTML5 utilizzata per la creazione di pagine HTML che devono contenere grafici.
• Supporta numerosi tipi di grafici: istogrammi, grafici a torta, grafici a stella, grafici a linee, ecc.
• Grazie all’utilizzo di questa libreria è possibile visualizzare i grafici delle misurazioni ambientali.
• Una pagina mostra i grafici a linee di temperatura, pressione, altitudine, distanza e luminosità in funzione del tempo.
• L’altra pagina mostra due grafici a stella che rappresentano la distanza e la luminosità intorno al Robot.

• La Fox Board ha al suo interno MYSQL, un DBMS (Database Management System) molto utilizzato.
• Il software di gestione utilizza proprio MYSQL per salvare i dati prelevati dal modulo Daisy 7 e dal modulo SRF08.
• In particolare, il software consente di salvare la temperatura, la pressione, l’altitudine in base alla pressione, la luminosità, la distanza da un ostacolo, le misurazioni inerziali dell’IMU, le coordinate geografiche, l’altitudine GPS e il numero di satelliti GPS disponibili.
• L e tabelle risultanti potranno essere visualizzate ed eventualmente modificate direttamente sul browser grazie all’utilizzo di PhpMyAdmin.

• La Finestra di Gestione è la finestra che appare non appena il software viene avviato.
• È formata da diversi pannelli ma solo un pannello alla volta può essere visualizzato dall’utente.
• In ogni pannello sono presenti pulsanti, menù a tendina, etichette e altri oggetti che permettono di agire su una parte specifica del Robot.
• I pannelli presenti sono: Menù (che permette l’accesso agli altri pannelli), Webcam, Misurazioni Ambientali, Misurazioni Inerziali, Movimento, Illuminazione, GPS, Data e Orario, Script, Configurazione della connessione.
• Nel Menù ci sono ulteriori pulsanti e informazioni del Robot.

• Questo Frame consente di visualizzare graficamente la posizione del Robot nello spazio attraverso l’uso delle Canvas 3D della libreria Java 3D.
• Il Robot viene rappresentato da un parallelepipedo rosso.
• Ogni 100 millisecondi il Robot invia i dati relativi all’IMU già filtrati e il RAT si occuperà di ruotare il parallelepipedo in base a questi dati.
• Due pulsanti permettono di ruotare manualmente il cubo per orientarlo nella giusta direzione rispetto al Robot.
• Un altro pulsante permette di resettare la posizione del cubo.
• Per la trasmissione, viene creata una nuova connessione sulla porta 4500, isolata dalla connessione principale (porta 4400).